Frame
|
Description
|
Method(s) to Render Frame
|
ICRF
|
Shows International Celestial Reference Frame (ICRF), the core inertial reference frame in which Cosmographia computes all positions and orientations.
|
Object Menu: Right-click object and click ICRF from the displayed options. This does not work for sensors and observations.
|
Intermediate Frame
|
Shows the intermediate frame used in defining the object’s orientation in the case of a two-step rotation definition.
|
Object Menu: Right-click object and click Intermediate Frame from the displayed options. This does not work for sensors and observations
|
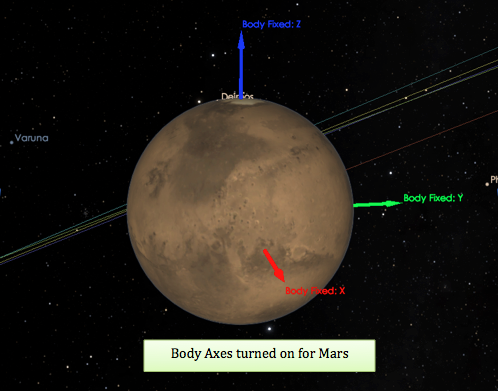
Body Fixed Frame
|
Shows the body-fixed frame, which is the frame that fixed to and rotates with the object.
|
Object Menu: Right-click object and click Body Fixed Frame from the displayed options. This does not work for sensors and observations
|
Spice Frames
|
Opens a list of all SPICE frames built into the SPICE toolkit and defined in all frames kernels loaded into Cosmographia at the moment from which one or more SPICE frames can be picked for visualization. As the other three types of frames, SPICE frames are shown centered at the selected body independently of the actual centers defined for these frames in SPICE system.
|
Object Menu: Right-click object and click Spice Frames from the displayed options. Click on desired frame to show it on body. This does not work for sensors and observations.
|